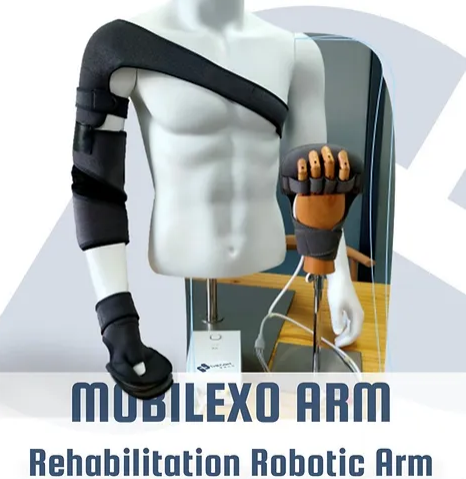
A novel multi-integrated robotic system that incorporates soft exoskeleton and neuromuscular electrical stimulation in one system for effective and self-help mobile rehabilitation after stroke. It can assist the elbow, wrist, and fingers to perform sequential arm reaching and withdrawing tasks under voluntary effort control through electromyography signals from the paretic limb, with a lightweight, compact, and low-power requirement design.